|
| void TA::PhysicsJoint::InitialiseSquareSocket
(
|
| const Vec3 &
|
v3Position,
|
|
| const Mat33 &
|
m33JointOrientation,
|
|
| float
|
fMinX,
|
|
| float
|
fMaxX,
|
|
| float
|
fMinY,
|
|
| float
|
fMaxY,
|
|
| float
|
fMinZ,
|
|
| float
|
fMaxZ
|
| ) |
|
|
|
|
Call this function to initialise the joint as a Square Socket. A Square Socket is constrained by the shape documented in the diagram below. This type of joint was specifically added for a fast flexible method for doing 'rag doll' to approximate hip and shoulder joints. It may also have other uses.
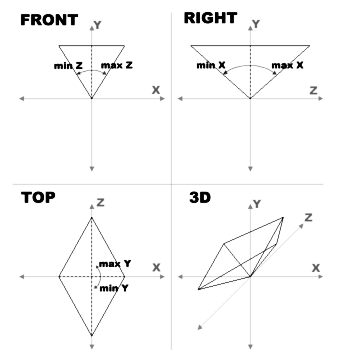
Joint Constraint Diagram
- Note:
- To create a joint, use TA::DynamicObject::AddJoint.
- See also:
- TA::DynamicObject::InitialiseSquareSocketEx.
- Parameters:
-
| v3Position |
| | The location, in world space, where the 2 objects are joined. |
| m33JointOrientation |
| | The initial orientation of the joint, specified in world space. The angle constraints work in the space specified by this orientation. |
| fMinX |
| | Minimum x rotation constraint. |
| fMaxX |
| | Maximum x rotation constraint. |
| fMinY |
| | Minimum y rotation constraint. |
| fMaxY |
| | Maximum y rotation constraint. |
| fMinZ |
| | Minimum z rotation constraint. |
| fMaxZ |
| | Maximum z rotation constraint. |
|
|